Cartographer 建图教程
这篇文章将介绍如何使用 Cartographer 来进行建图。
本地环境搭建
Cartographer 是一个独立的C++库,想要快速入门可以使用 ROS 集成。
因此,你需要:
- ROS
- Cartographer
安装 ROS
你可以在这里查询 ROS 安装方法。
ROS 安装版本为完整桌面版安装(Desktop-Full)。
安装 Cartographer
你可以在这里查询 Cartographer 安装方法。
Cartographer 的官方文档地址。
Cartographer 具体参数配置
创建 .lua 配置
每个机器人的配置必须从 Lua 脚本定义的数据结构读取的, 所以你需要配置不同的 .lua 文件来对应不同的机器人。
官方示例配置都在:
src/cartographer_ros/cartographer_ros/configuration_files 和
install_isolated/share/cartographer_ros/configuration_files/ 中。
如果想使用3D建图:
# 复制一份示例代码进行修改
cp install_isolated/share/cartographer_ros/configuration_files/backpack_3d.lua install_isolated/share/cartographer_ros/configuration_files/my_robot.lua
如果想使用2D建图:
# 复制一份示例代码进行修改
cp install_isolated/share/cartographer_ros/configuration_files/backpack_2d.lua install_isolated/share/cartographer_ros/configuration_files/my_robot.lua
具体配置可参考 Lua 配置参考文档以及Cartographer配置值。
创建 .launch 配置
Cartographe r的推荐用法是为每个机器人都提供不同的 .launch 文件。官方示例 .launch 文件在src/cartographer_ros/cartographer_ros/configuration_files 和 install_isolated/share/cartographer_ros/configuration_files/ 中。
可以先复制官方提供的示例之一:
cp install_isolated/share/cartographer_ros/launch/backpack_3d.launch install_isolated/share/cartographer_ros/launch/my_robot.launch
cp install_isolated/share/cartographer_ros/launch/demo_backpack_3d.launch install_isolated/share/cartographer_ros/launch/demo_my_robot.launch
cp install_isolated/share/cartographer_ros/launch/offline_backpack_3d.launch install_isolated/share/cartographer_ros/launch/offline_my_robot.launch
cp install_isolated/share/cartographer_ros/launch/demo_backpack_3d_localization.launch install_isolated/share/cartographer_ros/launch/demo_my_robot_localization.launch
cp install_isolated/share/cartographer_ros/launch/assets_writer_backpack_3d.launch install_isolated/share/cartographer_ros/launch/assets_writer_my_robot.launch
每个 .launch 文件的具体使用方法可查看这里。
运行自己的 Cartographer ROS
特别注意:不要在 src 下写自己的代码,不然重新编译时可能会失败。官方教程也是在install_isolated/share 文件夹下修改代码。
温馨提示:请大家在接下来的操作中做好备份,以防文件丢失。
默认大家的 Cartographer 的工作空间为 catkin_ws
默认大家所使用的雷达为 lsn10,雷达的功能包为 lsn10
2D 建图 + 激光雷达
1. 在 Cartographer ROS 中使用雷达
在 Cartographer 的工作空间下编译 lsn10 功能包。
将雷达的功能包放至 catkin_ws/src/cartographer_ros 下, 。
运行以下命令,编译新的工作空间:
# 重新编译工作空间
# 如果碰到报错,请删除所有已编译出来的文件,再次编译
catkin_make_isolated --install --use-ninja
看到 Finish 字眼说明编译成功。
2. 创建 .lua 配置文件
运行下列命令,复制 revo_lds.lua 文件作为自己的新的 .lua 配置文件。
# 进入 Cartographer 工作空间
cd catkin_ws
# 复制2D建图 revo_lds.lua 文件
cp install_isolated/share/cartographer_ros/configuration_files/revo_lds.lua install_isolated/share/cartographer_ros/configuration_files/my_robot_laser_only.lua
将参数 tracking_frame 修改成雷达的frame_id,即 laser。
将参数 published_frame 修改成底盘的frame_id,即 base_link。
将参数 provide_odom_frame 设置为 false。
没有用到里程计,所以将其设置成 false。
tracking_frame: SLAM 算法跟踪的帧的 ROS 帧 ID。
tracking_frame 一般设置为发布频率最高的传感器的 frame_id,Cartographer 将会把其他数据都转移到该坐标系下进行计算。
published_frame: 要用作发布坐标的子帧的 ROS 帧 ID。
如果 odom 框架由系统的不同部分提供,则设置为 odom。
在这种情况下将发布 map_frame 中 odom 的坐标。否则,将其设置为 base_link 可能是合适的。
具体代码如下:
tracking_frame = "laser"
published_frame = "base_link"
provide_odom_frame = false
将下列参数 TRAJECTORY_BUILDER_2D.min_range , TRAJECTORY_BUILDER_2D.max_range 修改成你所用的雷达的具体扫描参数。
具体代码如下:
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 11.
3. 创建 .launch 配置文件
运行下列命令,复制 demo_revo_lds.launch 文件作为自己的新的 .launch 配置文件。
# 进入 Cartographer 工作空间
cd catkin_ws
# 复制2D建图 demo_revo_lds.launch 文件
cp install_isolated/share/cartographer_ros/launch/demo_revo_lds.launch install_isolated/share/cartographer_ros/launch/my_robot_laser_only.launch
修改 cartographer_node 节点,映射雷达的 topic,即 /scan。
将 rviz 节点切换至你所用的 .rviz 文件。
关闭运行 bag 的节点。
增加 map 与 laser 的 tf 关系节点。
具体代码如下:
<launch>
<param name="/use_sim_time" value="true" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot_only_laser.lua"
output="screen">
<remap from="scan" to="/scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node pkg="tf2_ros" type="static_transform_publisher" name="laser_broadcaster"
args="0 0 0 0 0 0 map laser" />
<!-- 请修改成自己的 rviz 路径 -->
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="/home/zr/.ros/laser.rviz" />
</launch>
4. 合并雷达的功能包与 Cartographer ROS
将 lsn10 节点写进上述 .launch 文件。
节点代码如下:
<include file="$(find lsn10)/launch/lsn10.launch" />
整体 my_robot_laser_only.launch 代码如下:
<launch>
<include file="$(find lsn10)/launch/lsn10.launch" />
<param name="/use_sim_time" value="true" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot_only_laser.lua"
output="screen">
<remap from="scan" to="/scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node pkg="tf2_ros" type="static_transform_publisher" name="laser_broadcaster"
args="0 0 0 0 0 0 map laser" />
<!-- 请修改成自己的 rviz 路径 -->
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="/home/zr/.ros/laser.rviz" />
</launch>
5. 运行建图程序
运行以下命令,启动建图程序。
# 进入 Cartographer 工作空间
cd catkin_ws
# 千万不要编译!!!否则你刚写的代码都没啦!!!
# 具体原因为你的 src 里没有改动,所以编译的话会将你的 install_isolated 替换,就恢复成原始状态了。
# source 工作空间环境,使用 zsh 的同学别忘了切换成 zsh
source install_isolated/setup.bash
# 运行程序
roslaunch cartographer_ros my_robot_laser_only.launch
6. 在 rviz 中添加 topic
添加 Submaps 话题即可看到雷达建图。
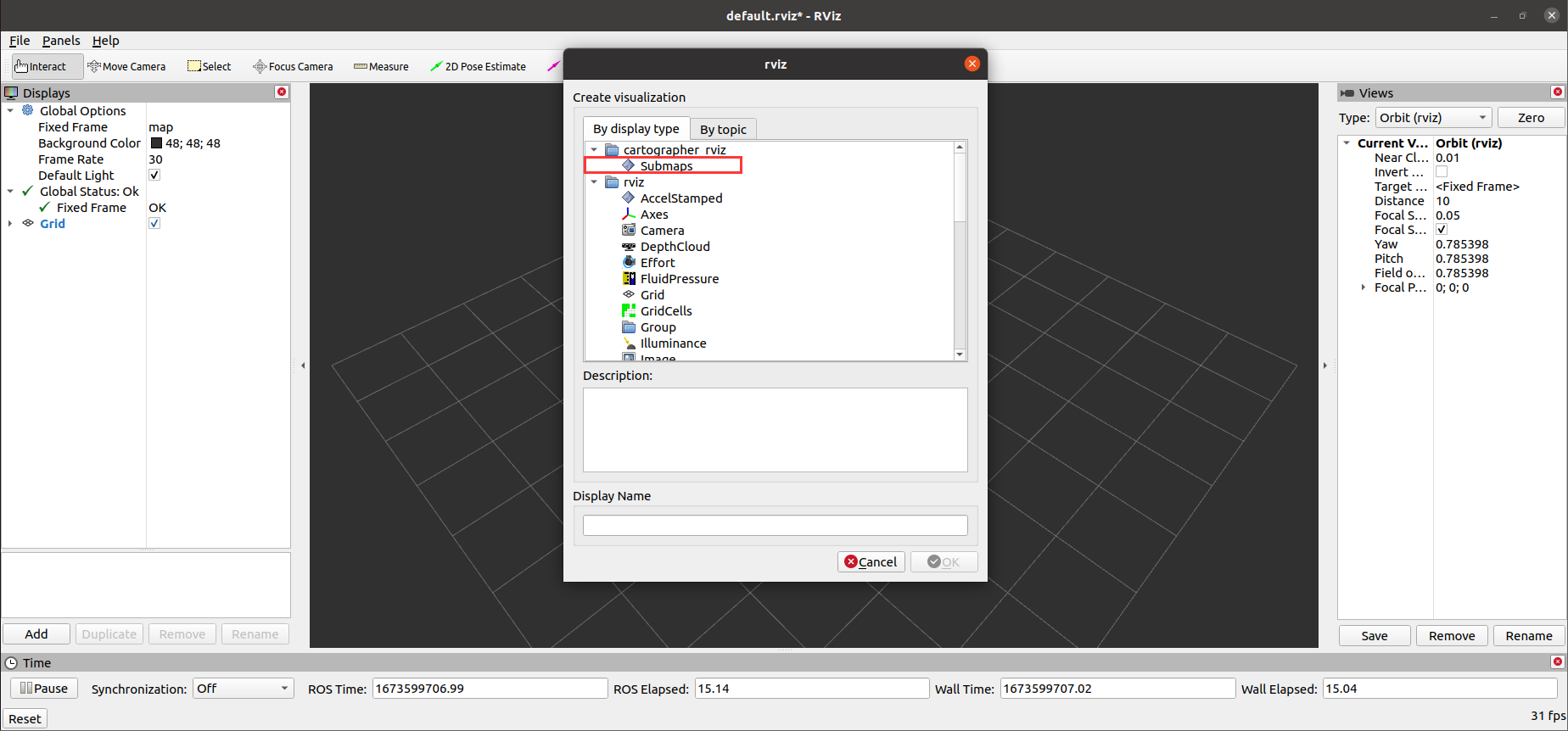
其他 topic 可自行添加。
主要使用的 topic 为 Map 、TF、LaserScan 、MarkArray 。
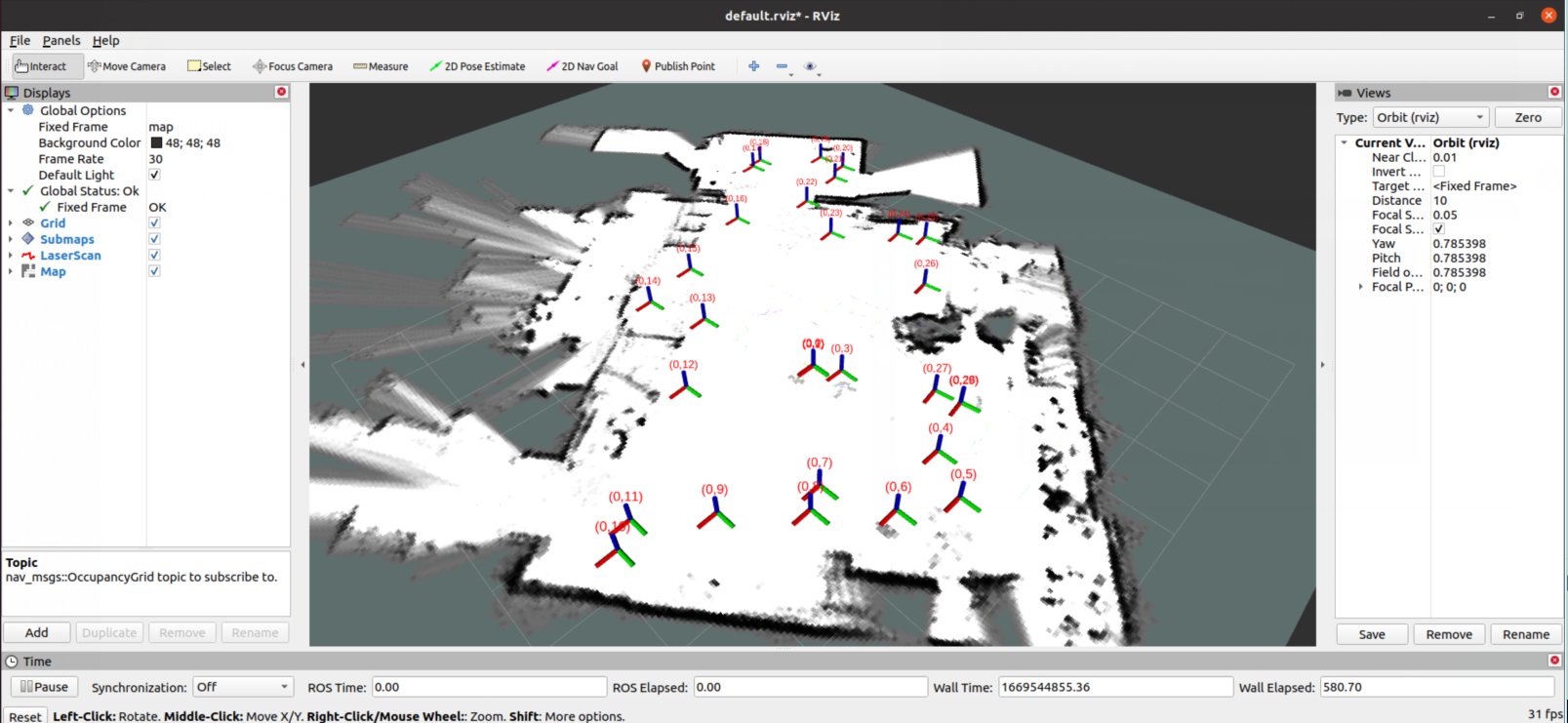
最终运行效果如下:
2D 建图 + 激光雷达 + 陀螺仪
1. 创建 .lua 配置文件
运行下列命令,复制 revo_lds.lua 文件作为自己的新的 .lua 配置文件。
# 进入 Cartographer 工作空间
cd catkin_ws
# 复制2D建图 revo_lds.lua 文件
cp install_isolated/share/cartographer_ros/configuration_files/revo_lds.lua install_isolated/share/cartographer_ros/configuration_files/my_robot_laser_imu.lua
将参数 tracking_frame 修改成陀螺仪的 frame_id。我这里使用的陀螺仪的 frame_id 为 imu_link。
将参数 publisher_frame 修改成底盘的 frame_id。我这里使用的底盘的 frame_id 为 base_link。
这两个参数具体解释可以看这里。
将参数 provide_odom_frame 设置为 false。
没有用到里程计,所以将其设置成 false。
具体代码如下:
tracking_frame = "imu_link"
published_frame = "base_link"
provide_odom_frame = "false"
将下列参数 TRAJECTORY_BUILDER_2D.min_range , TRAJECTORY_BUILDER_2D.max_range 修改成你所用的雷达的具体扫描参数。
具体代码如下:
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 11.
2. 创建 .urdf 配置文件
URDF 是一种基于 XML 规范、用于描述机器人结构的格式。
所以你需要配置一个 .urdf 文件来适配不同的机器人。
你可以在这里查询 .urdf 文件的写法。
这里提供我所使用的 my_robot_laser_imu.urdf 配置文件:
<robot name="my_robot">
<material name="orange">
<color rgba="1.0 0.5 0.2 1" />
</material>
<material name="gray">
<color rgba="0.2 0.2 0.2 1" />
</material>
<link name="base_link" />
<link name="imu_link">
<visual>
<origin xyz="0.0 0.0 0.0" />
<geometry>
<box size="0.06 0.04 0.02" />
</geometry>
<material name="orange" />
</visual>
</link>
<link name="laser">
<visual>
<origin xyz="0.0 0.0 0.0" />
<geometry>
<cylinder length="0.07" radius="0.3" />
</geometry>
<material name="gray" />
</visual>
</link>
<joint name="imu_link_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0.0 0.0 0.0" />
</joint>
<joint name="laser_link_joint" type="fixed">
<parent link="base_link" />
<child link="laser" />
<origin xyz="0.0 0.0 0.0" />
</joint>
</robot>
3. 创建 .launch 配置文件
运行下列命令,复制 demo_revo_lds.launch 文件作为自己的新的 .launch 配置文件。
# 进入 Cartographer 工作空间
cd catkin_ws
# 复制2D建图 demo_revo_lds.launch 文件
cp install_isolated/share/cartographer_ros/launch/demo_revo_lds.launch install_isolated/share/cartographer_ros/launch/my_robot_laser_imu.launch
添加 robot_state_publisher 节点,即添加机器人模型。
修改 cartographer_node 节点,映射雷达的 topic,即 /scan;映射陀螺仪的 topic,即 /IMU_data。
将 rviz 节点切换至你所用的 .rviz 文件。
关闭运行 bag 的节点。
具体代码如下:
<launch>
<param name="/use_sim_time" value="true" />
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/my_robot_laser_imu.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot_laser_imu.lua"
output="screen">
<remap from="scan" to="/scan" />
<remap from="imu" to="/IMU_data">
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<!-- 请修改成自己的 rviz 路径 -->
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="/home/zr/.ros/laser_imu.rviz" />
</launch>
4. 创建陀螺仪的节点文件
你需要有一份陀螺仪节点文件,并且添加 map 与 base_link 的 tf 关系�,base_link 与 imu_link 的 tf 关系,base_link 与 laser的 tf 关系。
然后像上述合并雷达的功能包与 Cartographer ROS 合并陀螺仪功能与 Cartographer ROS 即可。
5. 运行建图程序
运行以下命令,启动建图程序。
# 进入 Cartographer 工作空间
cd catkin_ws
# 千万不要编译!!!否则你刚写的代码都没啦!!!
# 具体原因为你的 src 里没有改动,所以编译的话会将你的 install_isolated 替换,就恢复成原始状态了。
# source 工作空间环境,使用 zsh 的同学别忘了切换成 zsh
source install_isolated/setup.bash
# 运行程序
roslaunch cartographer_ros my_robot_laser_imu.launch
6. 在 rviz 中添加 topic
添加 Submaps 话题即可看到雷达建图。
其它 topic 可自行添加。
主要使用的 topic 为 Map 、TF、LaserScan 、MarkArray。
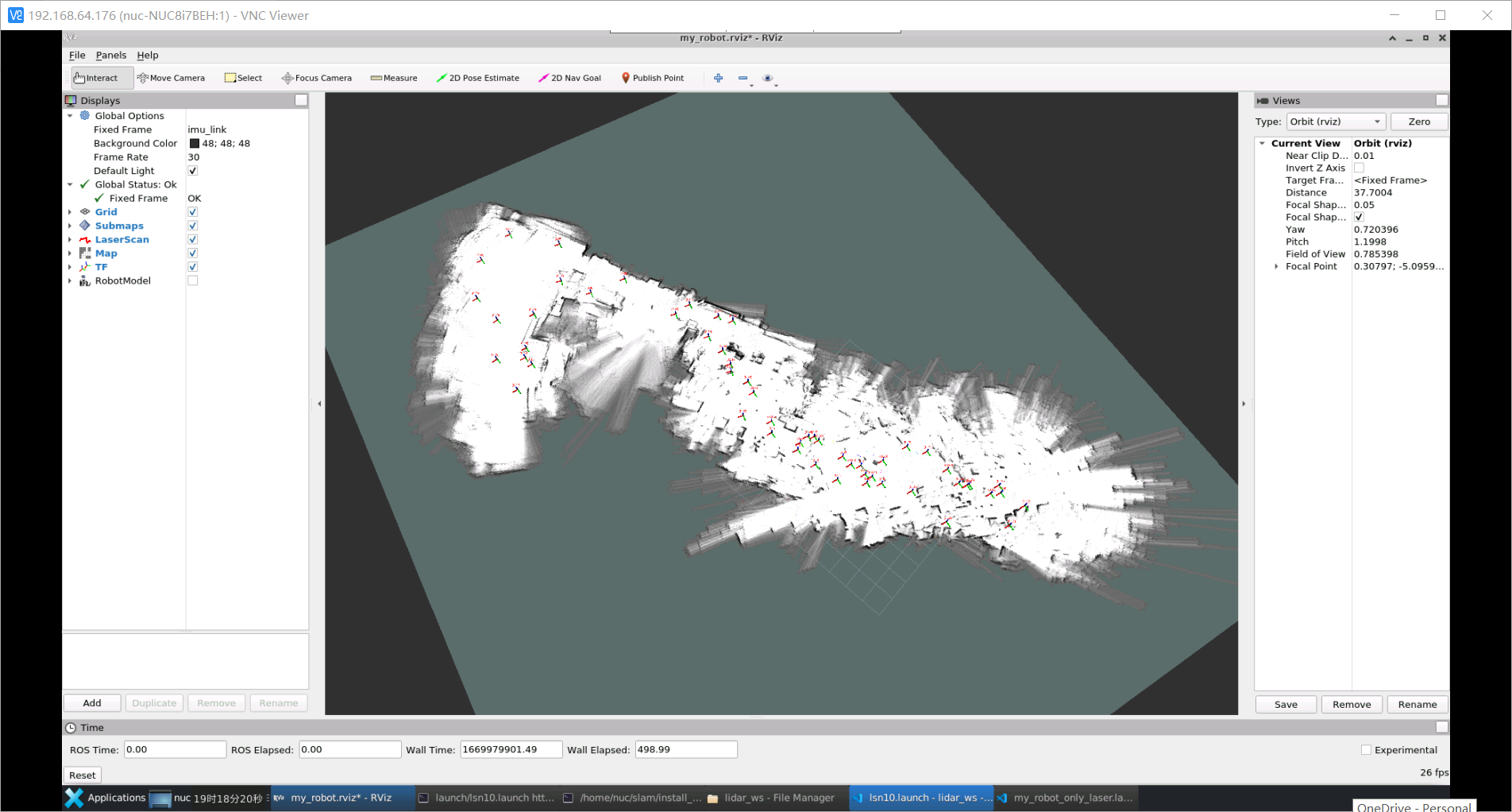
最终运行效果如下:
保存已建好的地图
使用 Cartographer 建图后是不会保存地图的,如果要将构建完成的地图用于之后的定位是需要将地图保存下来的。
要在 Cartographer 工作空间下使用以下命令。
1. 停止建图
当建图完成后,输入以下命令停止地图构建:
# 停止地图构建
rosservice call /finish_trajectory 0
2. 保存地图
输入以下命令保存已构建完成的地图:
# 保存地图
rosservice call /write_state "{filename: '<绝对路径>/‘<地图名字>’.pbstream'}"
# 如:
rosservice call /write_state "{filename: ${HOME}/catkin_ws/map/map.pbstream}"
3. 将 Cartographer 保存的地图转换为 ROS 格式下的栅格地图
rosrun cartographer_ros cartographer_pbstream_to_ros_map -pbstream_filename=<绝对路径>/<地图名字>.pbstream -map_filestem=<绝对路径>/<地图名字>
# 如:
rosrun cartographer_ros cartographer_pbstream_to_ros_map -pbstream_filename=${HOME}/catkin_ws/map/map.pbstream -map_filestem=${HOME}/catkin_ws/map/map>
为了更加方便地保存地图,��我们还可将这些命令做成一个脚本文件 CartographerSaveMap.sh。
脚本文件 CartographerSaveMap.sh 的代码如下:
#!/bin/bash
# enter the workspace
source install_isolated/setup.bash
# map folder
map_dir="${HOME}/catkin_ws/map"
# map name defined as current datatime
map_name=$(date +%Y%m%d_%H-%M-%S)
# check the file folder exist
if [ ! -d "$map_dir" ];then
echo "文件夹不存在, 即将创建文件夹"
mkdir -p $map_dir
fi
# finish slam
rosservice call /finish_trajectory 0
# make pbstream
rosservice call /write_state "{filename: '$map_dir/$map_name.pbstream'}"
# pbstream to map
rosrun cartographer_ros cartographer_pbstream_to_ros_map \
-pbstream_filename=$map_dir/$map_name.pbstream \
-map_filestem=$map_dir/$map_name
给脚本赋予权限:
sudo chmod 777 CartographerSaveMap.sh
运行脚本文件即可保存地图。
To Be Continued!!!
有问题找作者—— @hzr555
后续会更新 如何使用地图 部分(那也就是哨兵实车导航啦!)。